|
|
 |
 |
 |
 |
 |
|
| |
|
Intelligent Systems Group |
|
The current research direction of the intelligent systems group focuses on the integration of various robots with other types of technologies.
The main research achievements include:
- Robot Arm
- Humanoid Robot
- Wheeled Robot
- Pipeline Inspection Robot
- Soccer Robot
- 3D Laser Measurement Device
|
Robot Arm:
|
|
The laboratory has been developing robotic arms for many years. In addition to controlling the arm for precise positioning, significant progress has been made in controlling the gripping force of the arm and in force feedback sensing. In recent years, the lab has focused on the development of prosthetics, aiming to apply robotic arm technology to amputee patients. Currently, we are experimenting with integrating vision systems, hoping to achieve object grasping based on visual feedback.
The following image shows the latest robotic arm designed by our laboratory. This robotic arm has six degrees of freedom and uses six brushed DC motors. The motors are connected to a harmonic drive through a belt, achieving a maximum rotational speed of 110 deg/sec. The arm weighs approximately five kilograms, has a maximum payload of about two kilograms, and can extend up to approximately 510mm.

|
Bipedal Humanoid Robot:
|
|
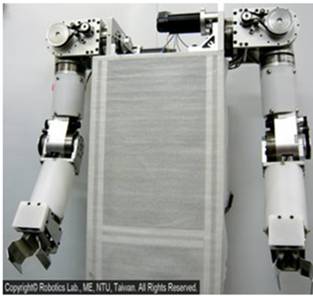
Our laboratory's current research on humanoid robots primarily focuses on the robot's mechanism and control algorithms. To enable interaction between robots and humans or the environment, we have designed mechanical palms and arms equipped with force sensors. This allows our robotic hands to avoid causing harm to humans or objects. The mechanical palm and arm developed by our laboratory are shown in Figures 1 and 2.
|
Figure 1: The robotic arm developed by our laboratory. |

|
Figure 2: The robotic hand developed by our laboratory. |
Figure 3 shows the three-finger robotic hand designed by our laboratory. This robotic hand has three active degrees of freedom and five passive degrees of freedom. It utilizes three brushed DC motors, transmitting power to each finger through steel wires. In terms of object grasping, the three degrees of freedom of this hand are sufficient to grasp most simple-shaped objects.
|
Figure 3: The three-finger robotic hand designed by our laboratory. |
In the trajectory planning of humanoid robots, our laboratory utilizes the relationship between the robot's center of mass and the center of pressure on its feet to establish an inverted pendulum model. This model is used to generate stable walking trajectories for the robot. Figure 4 shows the measured center of pressure on the feet and the robot’s center of mass trajectory during walking.
|
Figure 4: Center of pressure on the feet and the robot’s center of mass trajectory. |
Figure 5 shows the small biped robot designed using RC motors. By integrating four force sensors on the footplate and processing the data through MATLAB Simulink, we can determine the Zero Moment Point (ZMP) position of the footplate. Using the inverted pendulum model, we identify the robot's center of gravity (COG) trajectory and compute inverse kinematics based on the COG trajectory. Throughout the process, MATLAB Simulink is used to control the robot within ADAMS.
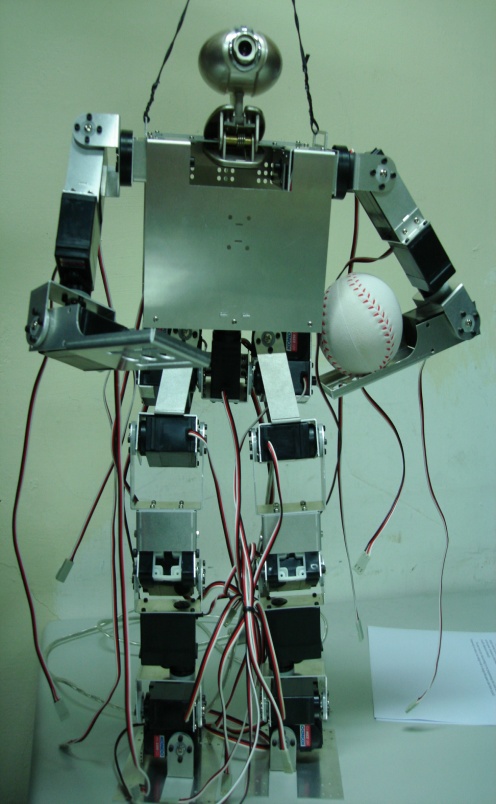
|
Figure 5: Small biped robot designed by our laboratory. |
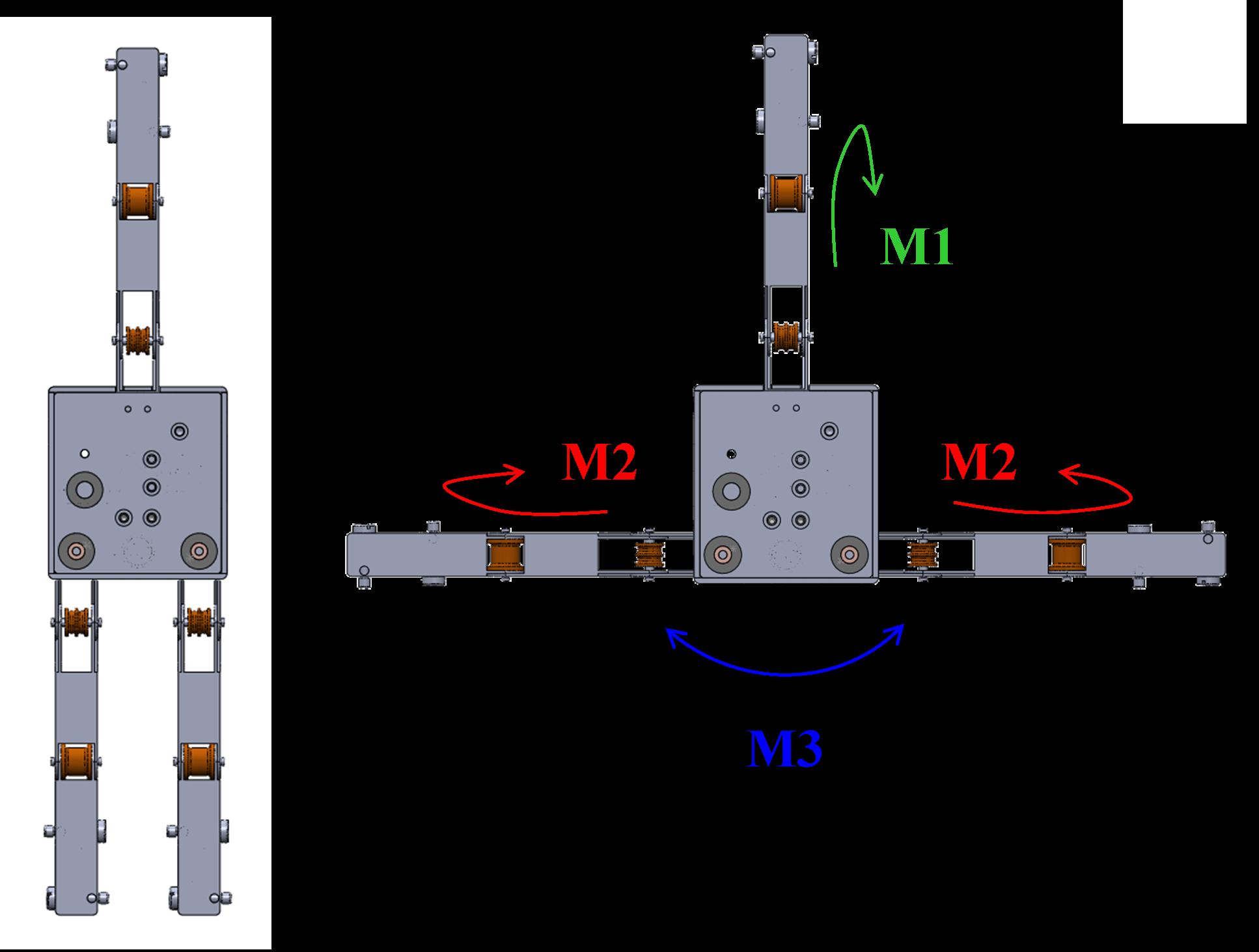
For the design of the mechanical leg, our laboratory utilizes Catia and SolidWorks to complete the structural design and stress analysis. The primary purpose of the stress analysis is to identify potential weak points in the structure in advance, allowing us to detect and avoid these weaknesses before manufacturing. This helps reduce design and modification time while saving costs. The mechanical leg designed by our laboratory is shown in Figure 6.
|
Figure 6: Structural design of the mechanical leg. |
In the future, our laboratory will focus on the development of full-body coordination control and human-robot interaction for humanoid robots. We aim to enable robots to better integrate into the human world and maximize their potential.
|
Wheeled Robot:
|
The Mobile Robots Group aims to develop innovative mobile robot technologies. The main research areas currently being explored are as follows:
Simultaneous Localization and Mapping (SLAM)
Robots use sensors to gradually measure information about the surrounding environment, while using SLAM algorithms to further complete localization and environment map tasks. Currently developed algorithms include RAMF, RASLAM, SLAMMOT-SP, etc.
Our laboratory uses the National Taiwan University History Gallery as an example, where two laser rangefinders were used to create a 2.5D map of the second floor of the history gallery. The map data is shown in Figure 7 below. The robot can use this map data along with the history gallery's collection information to transform into a tour guide robot for guided tours.
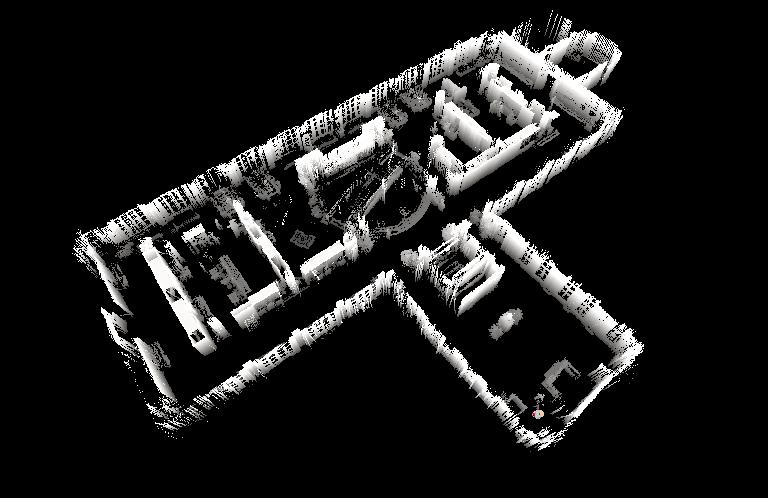 Figure 7: 2.5D map of the second floor of the National Taiwan University History Gallery.
Figure 7: 2.5D map of the second floor of the National Taiwan University History Gallery.
At the same time, the robot's facial expression can change according to the content of the tour explanation and interact with visitors. Figure 8 below shows the robot's facial expressions of joy, anger, sadness, and happiness.
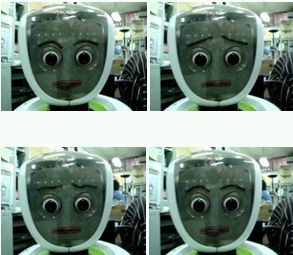
Figure 8: Robot's facial expressions of joy, anger, sadness, and happiness.
Autonomous Navigation
Autonomous navigation technology is one of the most important technologies for mobile robots. The most common problem faced by robots is how to move to a target point without colliding with obstacles. The current research focus on autonomous navigation systems is on anytime trajectory tracking, fast replanning, and considerations of uncertainty. Currently developed algorithms include DAO*, DDAO*, Predictive Anytime A*, Predictive Anytime RRT, etc.
Pedestrian Model Establishment
In the near future, more robots will appear in human society. In order for robots to more easily adapt and share space with humans, robots must understand human behavior. Moreover, to reduce the sense of oppression experienced by people around the robot, it must display socially acceptable and predictable behavior. In this area, our laboratory has proposed some frameworks to describe pedestrian behavior, such as the Motion Primitive Model, Spatial Behavior Cognition System, and Pedestrian Ego-Graph.
Environment Exploration
For robots to autonomously build environment maps, an appropriate exploration strategy is an essential skill. In this area, our laboratory has proposed a multi-robot exploration strategy, allowing multiple robots to effectively complete environment exploration tasks under limited communication range conditions.
Patrolling
In security robots and service robots, robots are often required to patrol designated locations. Patrolling algorithms provide optimal strategies that allow robots to patrol all locations in the shortest amount of time. In the patrol strategy algorithms, our laboratory has proposed multi-robot patrol strategies, enabling multiple robots to efficiently complete patrol tasks and quickly adjust their strategies in the event of an emergency.
|
Pipeline Exploration Robot:
|
Our laboratory's designed pipeline robot, NTU Navigator, features lightweight, modular design, easy control, and simple maintenance. This pipeline robot is composed of the following four modules: camera module, steering module, drive module, and functional module, each with its own circuit and special functions. In addition, our laboratory team has designed and optimized a functional module to allow our pipeline robot to adapt to various pipe diameters. At the same time, the robot can be easily controlled using a graphical interface on a computer. Furthermore, we use a self-developed stable, smooth fuzzy logic steering controller to ensure the robot operates more stably within the pipeline.
|
3D Laser Measuring Instrument:
|
We have developed a 3D laser probe with 3D coordinate measurement capability and applied it to robot calibration to improve the robot's accuracy.
|
Multiple Soccer Robots:
|
Our main goal is to develop the intelligent multiple soccer robot system, NTU-Formosa, aiming to enable the multi-robot system to efficiently perform tasks in unknown and changing environments. The cooperative control mechanism of the multi-robot system allows the developed robot control algorithms to execute on a distributed hardware architecture. A real-time image servo system is used to track and locate objects moving in the 2D space, employing position prediction to increase the efficiency of block searching. |
|
|
|